


Hexacopter
It all started when Doug Radford forwarded an email with this link http://mikrokopter.de/ucwiki/VideoAbspielen?id=188.
The link points to a German web site with a video demonstrating a Hexacopter. Doug's interest was aroused and, as the website is mostly in German, he asked for some German - English translation from yours truly.
The more I started reading, the more I got interested and the link to the shop became increasingly tempting. The only problem was that the price level in Germany is somewhat different from the Chinese benchmark we are used to...but after a few days of hesitation I had a weak moment and started clicking. A week later an almost empty box arrived....

I was lucky that my flatmate Andy was fascinated by the Hexacopter as well and offered to build the frame. So instead of spending $200 on some aluminium pieces, I ordered the electronics from Germany and the frame parts came from our local hi-tech supplier - Bunnings.
Many hours later (I think Andy underestimated the work required!) a new creature was born....
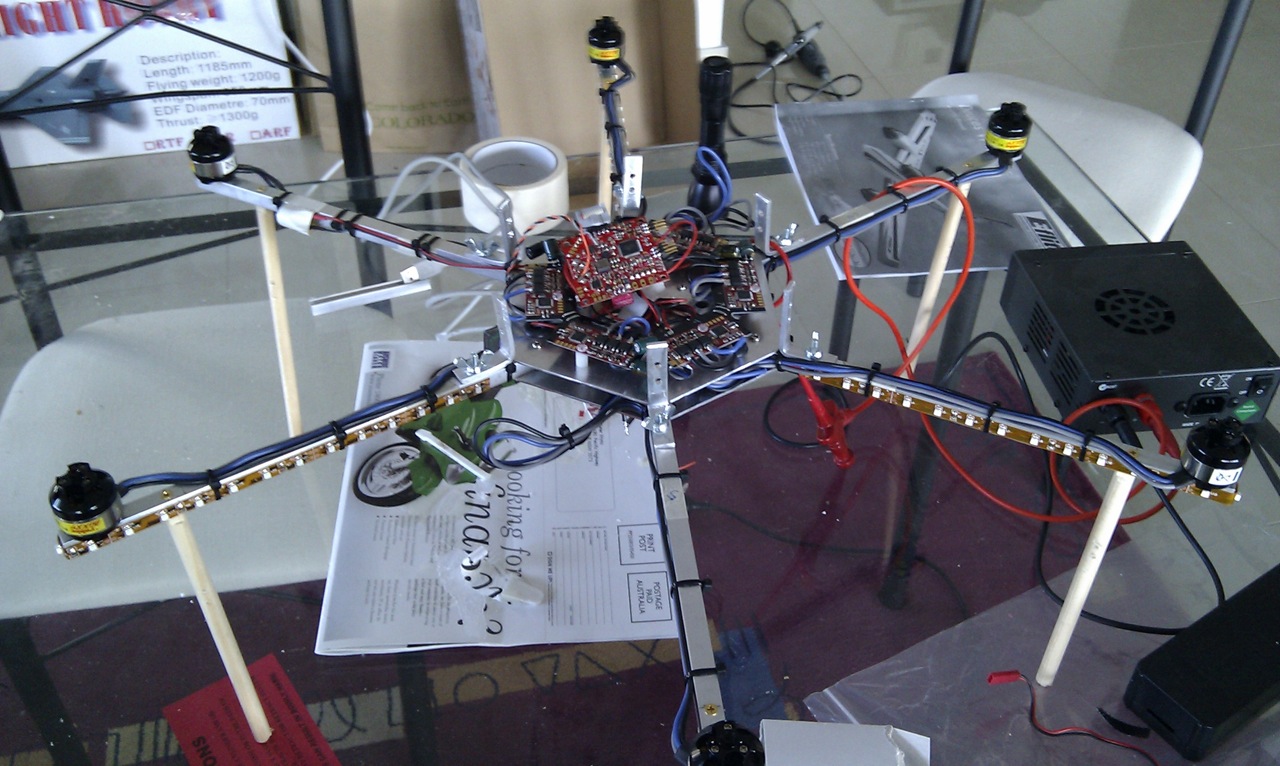
As you can see, building a Hexacopter has not much in common with building a Hurricane. A Hexacopter consists of 6 aluminium profiles with a motor on the end, a baseplate in the middle which holds everything together and a lot of electronics.
There are 6 speed controllers (each motor needs its own controller) and in the middle is the main flight control board.
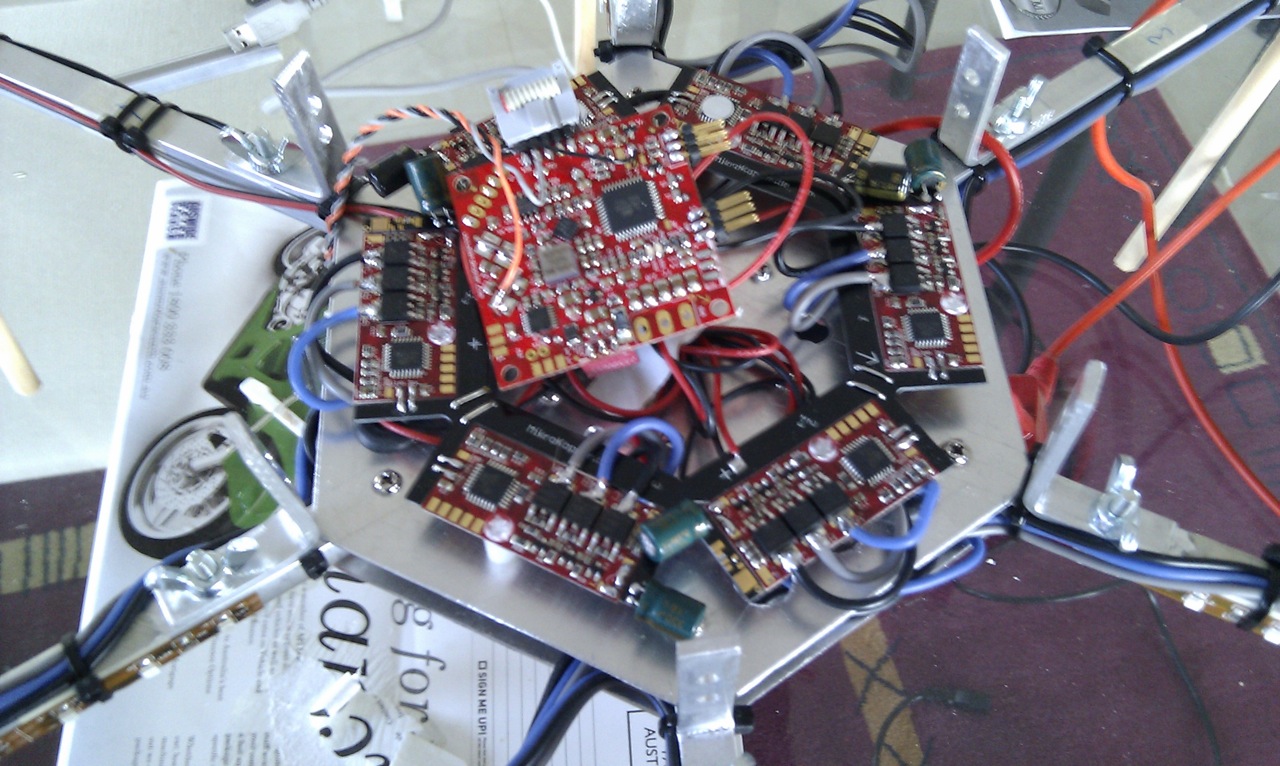
Work hasn't quite finished in this picture but clearly visible is the amount of soldering required. In fact, all the boards require the soldering on of some additional components and then comes all the connections to the speed controllers and motors. The 6 smaller boards on the picture are the speed controllers and the one in the middle the flight controller.
The Hexacopter has no moving parts apart from the motors but all motors are mounted fixed. So how on earth does it fly?
It all works with some smart software which varies the speed of each motor as required.
- opposite props are counter-rotating to eliminate the rotational forces
- for moving forward the rear motor speed is increased and the Hexacopter is, thus, tilted slightly forward
- for moving backwards the front motor speed is increased and this tilts the Hexacopter backwards
- same principle applies for moving to the right and left
- rotating (on the spot) is achieved by creating a speed difference between opposite motors (rotating clockwise -> increase speed of left and right props and lower speed of front and rear props)
The speed controllers are not quite the usual cheapo version either. A normal ESC, as we all know, is controlled by PWM signals from the receiver. Updates from the receiver to the ESC are done 50 times per second and while this seems rather fast, it is not fast enough for the Hexacopter. The 6 special ESCs are connected via I2C bus and are updated 500 times/sec (each)!
The flight control board contains an AVR Atmel microprocessor, 3 gyros, a height (pressure) sensor, a 3-axis acceleration sensor and a few more bits and pieces.
And as we already have a powerful microprocessor on board we don't need a normal receiver either. Instead we take a Spektrum remote receiver and solder the wires directly onto the flight controller board. The flight controller talks directly to the remote receiver and decodes the signals recieved, no normal main receiver required. (On the picture above the twisted wires from the top go to the receiver.)
As you would expect, instead of setting up aileron and elevator thows the Hexacopter is setup via computer and the special Microkopter tool which is available from the developer's web site.
Setup itself is reasonably easy if you go for the default settings but there are many, many, parameters to play with if you want to optimise and customise the behaviour.
Power is supplied by a normal LiPo. Either 3 cell or 4 cell can be used. I used a 4s 4000mAh as this was what I had available. Alll 6 motors are supplied by the single battery but luckily the motors are quite small only drawing 10-12A max. But still, this adds up to >60A for full power.
Here is the completed Hexacopter. The green "canopy" comes from Coles (it looks suspiciously like Pete has been going to Tupperware parties - Ed) and some bright red and blue LEDs have been added to help orientation. Without some visual aid it is difficult to see the orientation with a symetrical design like this.

And the all important question -- how does it fly???
In one word - excellent!
It flies similar to a heli but the self-stabilisation functions level it out automatically and make it a fair bit easier to fly than a normal heli. It is capable of rolls and loops however sustained inverted flight is not possible as there is no pitch control.
All the little electronic helpers can be adjusted and disabled if desired but at least in the "beginner" mode it is very easy to handle.
Here the video from the maiden flight.
{flv img="Hexa.jpg" showstop="true" width="960" height="540"}Hexacopter{/flv}
What next?
There is certainly more to come.
First will be the navigation controller (already on it's way from Germany!) which adds GPS navigation. This allows autonomous flights, position hold and "coming home" functionality.
The Hexacopter is obviously an ideal platform for photo and video work and the camera mount is already in the planning stage. Soon we should get some great video from high up....
And then there is still the possibility of MKII. The software can handle different configurations. So from a light-weight 4 motor racer to a 12 motor monster everything is possible 
Link: http://www.mikrokopter.de
Peter Wyss